

 联系我们
联系我们

集团概况:工博士是一家专注于为客户提供优质化综合智能解决方案的科技公司,深耕于智能制造行业和智能服务行业,砥砺前行近十年,发挥自身平台优势,辐射全国,促进工业制造自动化、商业服务智能化。
团队概况:工博士科技股份有限公司人工智能团队秉持“服务智慧生活,让生活更美好”的理念。我们专注于人工智能和机器人应用开发,提供新零售智慧终端、智能服务及商用服务机器人综合解决方案,让有机器人的地方就有工博士。
------------------------------------------------------------------------------------------------------------------------------------
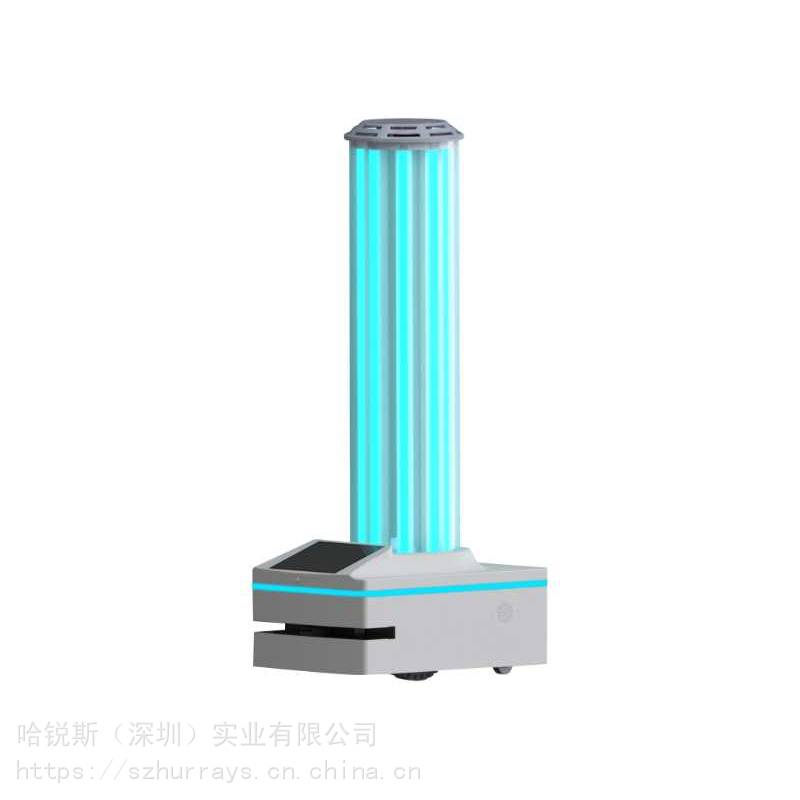
消毒杀菌机器人是一款通用型轮式底盘搭配紫外线灭菌灯组合起来的机器人, 适用于较平整地面的商场、家庭、学校、办公区域以及其他可封锁灭菌的场所;机器人配备了激光雷达,可实现周围环境的扫描测距检测,根据所获轮廓图进行规划性的消毒灭菌,避免人体近距离跟踪接触而受到不良影响。机器人使用高密度锂电池驱动,免维护,可循环使用周期长。
在消杀性能方面,该车体安装了8根紫外线灯管,实现360度覆盖消杀,累积光照强度:936UV/cm?,覆盖范围半径不少于6米,有良好的环境物表、空气的消杀效果。车体配置了人体感应模块,在作业过程中,感应到人体出现后紫外线灯会自动关闭,以免对人体造成伤害。
整机参数
尺寸
底盘尺寸(mm)
6354861530
重量
含电池
45KG
电源
电池
三元锂电池
电池容量
24V/40Ah
充电时间
≤2H
使用寿命
循环300次后保有80%
充电电压
29.4V
续航时间(空载)
6H
驱动轮
尺寸(轮径轮宽mm)
20050
材料
橡胶
功率
150W
转速
250r/min
扭矩
30NM
万向轮
材料
橡胶
尺寸(轮径轮宽mm)
5025
旋转半径(mm)
50
单个承重
80KG
性能
负载
50KG
运行速度
0.7m/s
导航精度
±50mm
方向
360°旋转
安全防护
急停按钮
紧急停止
人体感应
热红外人体感应器
遥控功能
配置遥控模块远距离控制
导航
导航方式
SLAM导航
路径规划
自动规划/手动路线规划
导航传感器
激光雷达(16米)
通信
无线网络
2.4G/4G 消毒机器人 WiFi
调试口
以太网RJ45
USB
USB2.0
无线透传
200M
环境
环境温度
0℃~45℃
环境湿度
相对湿度5~95%(屋结霜)
运行环境
仅室内使用(无粉尘、无腐蚀性气体)
防护等级
IP20
地面防滑系数
≥0.5
地面要求
混凝土水平地面(无水、无油、无粉尘)
地面条件
垂直越障能力
10mm
跨越沟壑能力
20mm
爬坡角度
5°
充电桩设计参数
充电桩
外形尺寸(mm)
400128250
输入电压
AC220V
消毒机器人输出电压
29.4/7A
额定功率
200W
基本操作
1. 开机操作:打开“总电源开关”启动机器,遥控可打开紫外线灯管,根据软件操作指导后开始消毒灭菌。(开机前请熟悉产品外观配置。)
注: 充电说明——充电桩摆放到合适位置,插上插头即可,机器人会自动回充;
人体感应说明——传感器感应到人会自动关闭紫外线灯;
电池更换说明
以下操作需在关闭机器总电源,机身及紫外线灯管停止工作的情况下进行。
1.松开机身背后四枚螺丝后,取下电池口盖板。
2. 找到与连接电池的线,拔下分离转接头,然后把电池从机身内取出。
3. 把新电池插进原来的位置,连接好转接头,锁上电池口盖板即完成更换动作。
软件操控说明
一、连接
打开“BJDG-Robot”App,进入控制程序,打开界面如下:
默认ip地址一般不用修改,直接点击“连接slamware”进入控制界面,如连接失败则会弹出弹窗,请检查网络是否有连通;
手机App连接,搜索wifi名BJDGRobot_XXXX,密码是bj12345678,连接wifi成功即可进入app;
二、操作
消毒机器人 界面中间显示的是地图,左侧显示机器人状态、机器设置和运动控制等;
暂停建图/继续建图——切换建图状态;
自由导航——切换导航模式;
开始巡逻——开始沿保存的点巡逻;
回桩充电——返回充电桩;
保存地图——保存地图到本地;
设置地图——加载本地保存的地图;
清空地图——清空当前地图和保存的;
终止操作——停止当切操作;
保存——手动保存机器人当前位置为;
显示——显示保存的,再点击隐藏;
1、扫描地图
机器人步操作是扫描地图,在机器人建图状态下,通过控制机器人运动,自动扫描所在环境地图。有两种方式控制机器人运动去扫图:
① 通过左侧运动控制按钮
② 通过点击地图,机器人会去到地图对应的点
这里尽量使用种方式,因为扫图过程中点击运动的点会记录下来,自动生成巡逻的路线,后面巡逻会用到。
当地图扫完后点击“保存地图”把地图保存下来,如不需要更改地图,以后每次使用就不用扫描地图。
注意:重新建图前先点击“清空地图”,清空之前的地图数据!
2、巡逻
默认在自由导航下,先点击“设置地图”,加载保存好的地图,确保保存地图是当前环境扫描地图,然后点击开始巡逻,机器人会按照扫图的路线进行巡逻消毒;
注意:确保机器人每次要在固定的充电桩位置上开机!